
Che si tratti di aziende, industrie o gestione municipale, il controllo del traffico e la gestione intelligente dei parcheggi sono argomenti degni di attenzione. Oggigiorno, diversi metodi di rilevamento dei veicoli, come i sensori a ultrasuoni, i sensori ottici e i rilevatori magnetici, presentano alcune limitazioni nel rilevamento della presenza di veicoli, che rappresentano notevoli ostacoli all'ottimizzazione del flusso del traffico. Pertanto, è fondamentale conoscere e configurare il sistema di rilevamento dei parcheggi più adatto. Ci concentreremo sul rilevamento dei veicoli a microonde per aiutarvi a decidere se scegliere questa soluzione per il vostro rilevamento dei veicoli. Se state cercando un produttore che utilizzi sensori di movimento radar a microonde per il rilevamento dei parcheggi, assicuratevi di leggere l'intero contenuto di questo articolo. MOKOSmart si concentra sulla produzione e sulla ricerca e sviluppo di prodotti IoT da oltre 16 anni e il nostro LW009 utilizza anche... sensore geomagnetico e sensore radar a microonde. In questo articolo forniremo anche un'introduzione dettagliata alle caratteristiche del nostro prodotto.
Che cos'è un sistema di rilevamento veicoli a microonde?
Il sistema di rilevamento veicoli a microonde utilizza segnali radio ad alta frequenza trasmessi su una linea diretta. Il rilevatore registra le variazioni di frequenza delle onde che si verificano quando la sorgente a microonde e il veicolo sono in movimento relativo. Questo consente al dispositivo di rilevare i veicoli in movimento. Il radar può rilevare oggetti distanti e determinarne la posizione e la velocità. La ricerca ha dimostrato che i sensori radar a microonde forniscono dati reali e accurati per ridurre la congestione del traffico e i problemi di parcheggio, ma questa tecnologia è anche vulnerabile alle condizioni meteorologiche, soprattutto in condizioni meteorologiche e ambientali avverse.
Storia del rilevamento radar
Radar è l'abbreviazione di radio detection and ranging (rilevamento e misurazione della distanza tramite radio). Alla fine del XIX secolo, Heinrich Hertz fu il primo a dimostrare che le onde radio potevano essere riflesse da oggetti metallici. Christian Hulsmeyer lo utilizzava per individuare le navi ed evitare collisioni all'inizio del XX secolo.
Fino alla Seconda Guerra Mondiale, il radar fu notevolmente migliorato e utilizzato per misurare gli impulsi sugli oscilloscopi. Fu anche in questo periodo che gli scienziati scoprirono che il radar poteva essere utilizzato per determinare la distanza e l'angolazione di un bersaglio. Decenni dopo, questa tecnologia ha trovato ulteriori applicazioni in altri ambiti, tra cui il rilevamento dei veicoli.
Come funziona il rilevamento dei veicoli a microonde
Esistono due tipi di sensori radar a microonde, sono Radar Doppler CW e radar FMCW.
Effetto Doppler
Nel 1842, Christian Doppler descrisse un fenomeno in cui la frequenza o la lunghezza d'onda delle onde (luce, suono, ecc.) aumentava o diminuiva. Nel radar Doppler, la velocità del veicolo è proporzionale alla variazione di frequenza tra le onde ricevute e quelle trasmesse. Il fenomeno può essere utilizzato per rilevare la presenza di veicoli.
Il segnale riflesso dal veicolo può essere utilizzato per misurare il canale, la presenza, il volume, l'altezza libera, la classificazione, la velocità, ecc. e può fornire avvisi di prevenzione delle collisioni, avvisi di area di pericolo, avvisi di direzione errata e avvisi di parcheggio. Per una data dimensione dell'antenna, maggiore è la frequenza, maggiore è la risoluzione spaziale del radar.
Il radar Doppler CW emette onde corte (CFW). La trasmissione costante della frequenza nel tempo consente di calcolare la velocità del riflettore. La frequenza della forma d'onda riflessa aumenta quando il veicolo si trova vicino al radar e diminuisce quando il veicolo si allontana dall'antenna radar. La formula del radar Doppler è:
v = c × fD / 2 × fC × (cos ϑ)
Dove
v = velocità
c = velocità della luce
ϑ = angolo tra la direzione del veicolo e la propagazione delle onde radar
f C = frequenza portante
f D = frequenza Doppler
Uno dei principali svantaggi intrinseci del radar CW Doppler è la sua incapacità di rilevare se sono presenti veicoli parcheggiati.
Radar FMCW
Nel radar FMCW, la frequenza della lunghezza d'onda cambia nel tempo. Il nostro rilevatore di veicoli LW009 utilizza il radar FMCW. Questo dispositivo radar è in grado di rilevare la presenza di veicoli parcheggiati, nonché la presenza di altri veicoli.
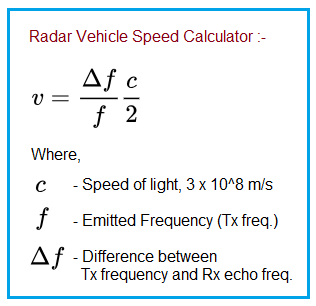
La distanza del veicolo è direttamente proporzionale alla differenza tra la frequenza del trasmettitore durante il rilevamento e la frequenza del trasmettitore durante la ricezione, espressa come:
R = c × T × Δf / (2 × B)
Dove
R = autonomia del veicolo
Δf = differenza istantanea di frequenza tra ricezione e trasmissione del segnale
B = Larghezza di banda di modulazione RF
T = Periodo di modulazione o periodo di tempo
Il radar FMCW calcola la velocità di un veicolo suddividendo le corsie del percorso in intervalli o zone di lunghezza nota. La formula per la velocità del veicolo è:
v = d /ΔT
Dove
v = velocità del veicolo
d = distanza tra i bordi anteriori delle zone
ΔT = tempo tra l'arrivo del veicolo ai bordi anteriori delle zone/contenitori adiacenti
I radar FMCW sono versatili e possono anche utilizzare l'effetto Doppler per calcolare la velocità del veicolo.
In base al confronto dei dati sopra riportato, possiamo affermare che il radar FMCW è superiore al radar CW nel rilevamento dei veicoli e nella raccolta dati. È in grado di valutare con precisione la presenza, la velocità, l'orario di arrivo, l'occupazione, la classificazione e il tempo di attesa dei veicoli, nonché di rilevare incidenti, identificare veicoli parcheggiati e fornire avvisi di emergenza e avvisi di guida errata.
Perché utilizzare il rilevamento dei veicoli a microonde
A differenza dei sensori fotoelettrici o a ultrasuoni, i sensori radar a microonde sono meno influenzati da temperatura, pioggia, vento, nebbia, umidità, luce e altre condizioni. Di conseguenza, possono fornire dati accurati per il rilevamento del parcheggio in esterni, nonché per il rilevamento di veicoli fermi e in movimento. Inoltre, l'installazione e la manutenzione sono più semplici rispetto ad altre tecnologie di rilevamento. Infine, il rischio di danni all'apparecchiatura è inferiore poiché il rilevatore di traffico radar non è montato su binari.
Sfide del sensore di parcheggio radar a microonde
Può essere difficile per i sensori radar rilevare bersagli più piccoli e veicoli con poco spazio tra loro. Inoltre, possono rilevare solo veicoli che viaggiano a una velocità superiore a quella preimpostata. I veicoli al di sotto di tale velocità potrebbero essere lasciati in attesa di un cambio di segnale per attivare il veicolo successivo. Poiché i sensori di movimento a microonde sono solitamente montati sopra il semaforo, non sono facili da ispezionare da terra. È necessaria una corsia separata per rilevare i veicoli che svoltano a destra, ma è possibile utilizzare una combinazione di rilevatori ad anello e a microonde agli incroci. I rilevatori di veicoli a microonde possono anche essere utilizzati come semafori per controllare il traffico sullo stretto ponte che conduce all'ingresso e all'uscita del parcheggio.
Dove può essere utilizzato il rilevamento dei veicoli a microonde?
Linee ferroviarie: I treni si muovono velocemente, uno dopo l'altro, e un rilevamento accurato della loro presenza può essere segnalato dietro le quinte per avvisare di quanto tempo il treno arriverà in stazione e di quanto tempo passerà prima che il treno successivo passi sullo stesso binario. Il rilevamento dei veicoli a microonde può non solo migliorare l'efficienza lavorativa, ma anche evitare i disastri causati dalla negligenza umana.
Banchina di carico: Lo spazio per i veicoli sulla banchina è limitato, ma un camion dopo l'altro arriva per scaricare. Pertanto, affinché le merci possano entrare e uscire dal camion in modo efficiente, è importante avvisare l'operatore non appena il camion arriva.
Stazioni di ricarica per veicoli elettrici: Se le auto nelle stazioni di ricarica non vengono posizionate in modo standard e causano congestione, l'esperienza dei clienti peggiorerà inevitabilmente, con conseguente calo degli affari. Pertanto, per impedire che le auto non vengano parcheggiate secondo le normative presso le stazioni di ricarica, nonché per rilevare tempestivamente i veicoli parcheggiati senza autorizzazione presso le stazioni di ricarica per veicoli elettrici, molte stazioni di ricarica hanno installato sensori di monitoraggio radar.
Casello autostradale: Il sensore radar a microonde rileverà la presenza del veicolo e attiverà la barra di arresto quando il veicolo si avvicina al casello. Ciò migliora l'efficienza del traffico, ottimizza i processi e riduce la manodopera e la pressione del traffico.

Perché scegliere LW009 di MOKOSMART?
MOKOSMART ha sviluppato un sistema di rilevamento veicoli che integra radar a microonde e sensori magnetici per aiutare il personale addetto a trovare la soluzione più adatta alle proprie esigenze, grazie a un rilevamento preciso a doppia modalità. Di seguito sono riportati alcuni vantaggi derivanti dalla scelta del nostro piano:
Il sensore a doppia modalità migliora notevolmente la precisione del rilevamento: I sensori di parcheggio più comuni sul mercato sono solitamente a rilevamento magnetico singolo o solo radar, il che aumenta notevolmente la probabilità di un falso rilevamento quando interferiscono con un campo elettromagnetico o altri ambienti ristretti, e la precisione del rilevamento può superare il 99%.
Facilità di installazione e manutenzione: Sono disponibili due modelli del nostro sensore di parcheggio per supportare diversi metodi di installazione. LW009-IG può essere incassato nel pavimento ed è dotato di una struttura a manicotto rimovibile per semplificare la manutenzione post-vendita. LW009-SM viene fornito con colla per evitare forature. Sono inoltre supportati sensori di temperatura e umidità per rilevare la presenza di ghiaccio sulla strada.
Alta affidabilità: La distanza di trasmissione ultra-lunga di LoRaWAN è di 500m~1000m e la batteria a basso consumo ne aumenta la durata fino a 5 anni.
Come funziona il nostro LW009
Il nostro sensore di rilevamento del parcheggio del veicolo adotta un metodo di rilevamento dello stato di parcheggio che combina campo magnetico e microonde, caratterizzato come segue: L'apparecchiatura utilizzata in questo metodo comprende un sensore geomagnetico a tre assi e un sensore radar a microonde, che comprende i seguenti passaggi:
Passo 1: Utilizzare il sensore geomagnetico triassiale per monitorare il valore di fluttuazione, il valore picco-picco e il valore medio dei dati del campo magnetico triassiale XYZ per valutare le variazioni dello stato di parcheggio. Se i dati campionati sono prossimi al valore critico, avviare il sensore radar a microonde;
Passo 2: Acquisizione e pre-elaborazione dei dati a microonde: il sensore radar a microonde viene utilizzato per eseguire la scansione di onde triangolari a intervalli uguali e vengono ricevuti due segnali per ciascun punto di frequenza discreta. La formula della finestra di Hanning viene utilizzata per elaborare i dati raccolti e la trasformata di Fourier discreta viene utilizzata per elaborare ulteriormente i dati, convertendo il dominio del tempo nel dominio della frequenza per l'analisi;
Passo 3: Rilevamento dei veicoli a microonde, inclusi i seguenti passaggi:
Passo 3.1: I dati ottenuti nel passaggio 2 vengono analizzati nel dominio della frequenza e vengono modulati;
Passo 3.2: Inviare i dati del modulo ottenuti nel passaggio 3.1 al predittore SVM per ottenere il risultato della decisione del predittore SVM sullo stato di parcheggio;
Passo 3.2: Inviando i dati del modulo ottenuti nel passaggio 3.1 al predittore della rete neurale, è possibile ottenere il risultato del giudizio del predittore della rete neurale sullo stato del parcheggio;
Passo 4: Regolazione dinamica del peso, che comprende i seguenti passaggi:
Passaggio 4.1: Innanzitutto, viene preimpostato un peso di giudizio in base alla precisione del sensore geomagnetico a tre assi, del predittore SVM e del predittore della rete neurale.
Passo 4.2: Se i risultati dei tre giudizi sono coerenti, il peso rimane invariato;
Passo 4.3: Se i tre risultati del giudizio sono incoerenti, il peso verrà ricalcolato in base alla loro rispettiva accuratezza;
Passo 5: Lo stato del parcheggio dopo un giudizio complessivo viene ottenuto in base ai pesi più recenti basati sui risultati del rilevamento del parcheggio geomagnetico, sui risultati del giudizio del predittore SVM e sui risultati del giudizio del predittore della rete neurale.
Il nostro sistema di rilevamento del parcheggio è adatto al tuo ambiente?
Indipendentemente dal settore in cui operi e dal tipo di sistemi di rilevamento veicoli intelligenti che stai cercando, MOKOSMART può accelerare l'implementazione e aumentare la personalizzazione in base alla tua struttura e alle tue effettive esigenze.
Se la tua struttura richiede solo l'ispezione di veicoli mobili, il nostro rilevatore di veicoli wireless LW009 ti offre la flessibilità di ispezione di cui hai bisogno. Inoltre, se hai bisogno di rilevare la presenza di persone e oggetti oltre al loro movimento, il nostro sensore PIR può essere utilizzato in combinazione con il tuo scenario applicativo. Contatta il nostro team e lasciaci scegliere il prodotto ideale per il tuo progetto.
Continua a leggere sul rilevamento dei veicoli











